Vishrut Kinikar
Introduction
The behavior of Josephson junctions, the performance of coupled oscillator grids, the luminous flashing of an ensemble of fireflies, along with the clapping of a lively audience, are all coherently elucidated by a simple mathematical model – the Kuramoto model. The model lays down a framework by which a population of oscillators possessing all-to-all coupling synchronize over time. With its numerous practical applications and immense interdisciplinary potential, the Kuramoto model warrants further academic study. A coherent academic study was thus undertaken by the writer and the work produced by the writer sought to explain the effect of topology on the synchronization of the Kuramoto model. This article shall serve as a brief overview of the aforementioned academic study. The Kuramoto model is given by the following ordinary differential equation (ODE):
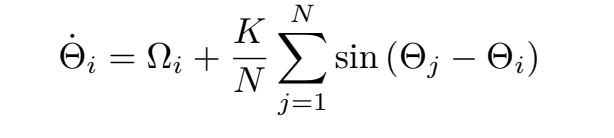
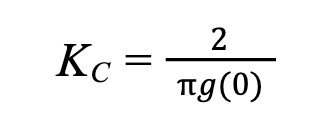
As can be seen in the above equation, the frequency of a given oscillator depends on the sine of the difference in its own phase and the phase of another oscillator. This entails that oscillators in the Kuramoto model either augment or diminish their respective angular speeds (frequencies) to facilitate synchronization. A clear visual demonstration of the model can be found at Ride My Kuramotocycle!. The coupling is mediated by the coupling constant K which yields synchronization at a critical value. The coupling is governed more generally by the mean field of the oscillator population and this mean field depends on the average phase of the oscillators. The critical coupling constant for an all-to-all Kuramoto model which can be found using the following expression:
This expression was used in the second part of my investigation which dealt with spontaneous synchronization transitions.
Part 1: Ring and Chain Topologies – A Comprehensive Comparison
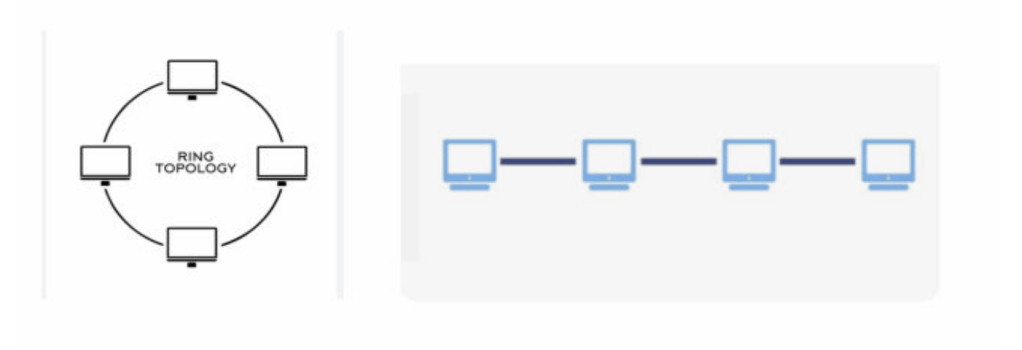
Simply put, topology refers to the shape or structure in which oscillators in a given dynamical system are arranged. Common topologies include the ring, chain, mesh, and star. The topologies relevant to this phase of the study are the ring and chain topologies. As suggested by the name, the ring topology consists of nodes arranged in a round ring-like fashion and it possesses nearest-neighbor coupling (each node is coupled only two its two immediate neighbors). The ring topology possesses what is known as the periodic boundary condition which mandates that the each node is always coupled to exactly two other oscillators with no exceptions. In other words, the periodic boundary conditions establishes that the oscillator ΘN must be coupled to ΘN-1 and Θ1, embodying a periodic loop with no open ends. The chain topology on the other hand is characteristic of a dynamical system in which nodes are arranged in a linear fashion. The chain also possesses nearest-neighbor coupling with each node being coupled to its nearest two nodes. However, as opposed to the ring, the chain possesses what is known as the open boundary condition, meaning that each oscillator is coupled to exactly two oscillators with the exception of the first and last oscillators which are coupled to only one other oscillator. In other words, the open boundary condition holds that Θ1 is coupled only to Θ2 and ΘN is coupled only to ΘN-1, embodying a chain with open ends. Additionally, it is important to note that the assumption of nearest-neighbor coupling for both the ring and the chain is not arbitrary, rather it is the result of a well-established mathematical property which states that the degree of each node (the amount of other nodes that the given node is coupled to) is given by 2d where d denotes the number of dimensions of a given lattice. Since the given topologies are two-dimensional, the degree of each node is 2.
This part of the research dealt with observing whether the long-term behavior of dynamical systems in ring and chain topologies converged. The final average order parameter was used as an indicator of the convergence. The order parameter, denoted r, is a number in the range [0,1] which denotes the synchronization level of a given dynamical system. r = 0 corresponds to no synchronization and r = 1 to full synchronization or a phase-locked state (oscillators maintain constant phase difference over time). The final average order parameter, r∞, is the value the order parameter approaches as time increases without bound.
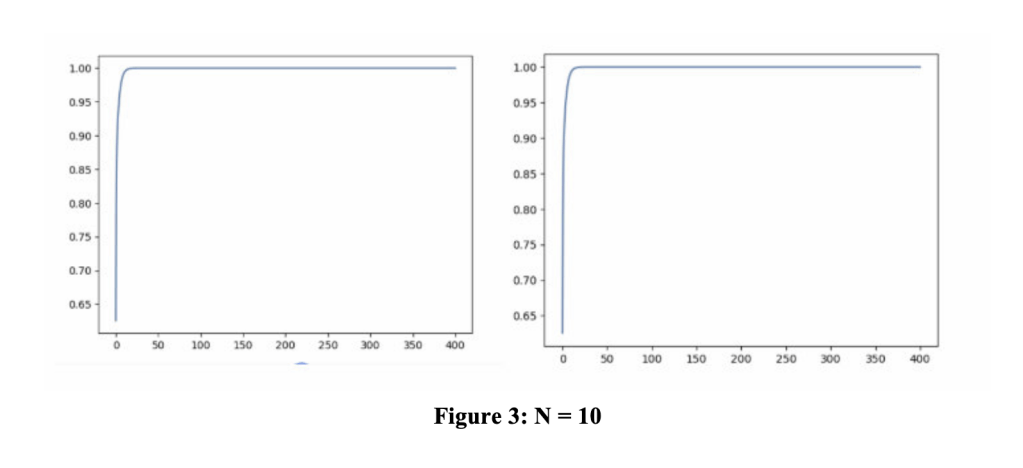
The estimated value of r∞ was obtained for both the ring and chain topology for varying oscillator amounts. By running simulations for N = 10, N = 50, N = 100, and N = 1000 where N denotes the number of oscillators, a graph displaying the order parameter r as a function of time was generated for each topology, allowing for an estimate of the value of r∞ to be collected in each case. Two cases were tested: one in which the natural frequency of each oscillator in the system was identical and one in which the natural frequencies of each oscillator were heterogeneous and randomly selected from a Gaussian distribution. A coupling constant of K = 1 was used for all simulations and trials. The simulations for the first case demonstrate global synchronization for N = 10, N = 50, and N = 100 but partial synchronization for N = 1000. The simulations show that a phase-locked state is guaranteed for all dynamical systems regardless of topology or oscillator amount given that the oscillators have identical natural frequencies. The result of a phase-locked state is already predicted as by the existence of identical natural frequencies as identical natural frequencies guarantee identical final frequencies. The obtained simulations corroborate this result. The simulated r(t) graphs for the dynamical systems with identical natural frequencies are given as follows:
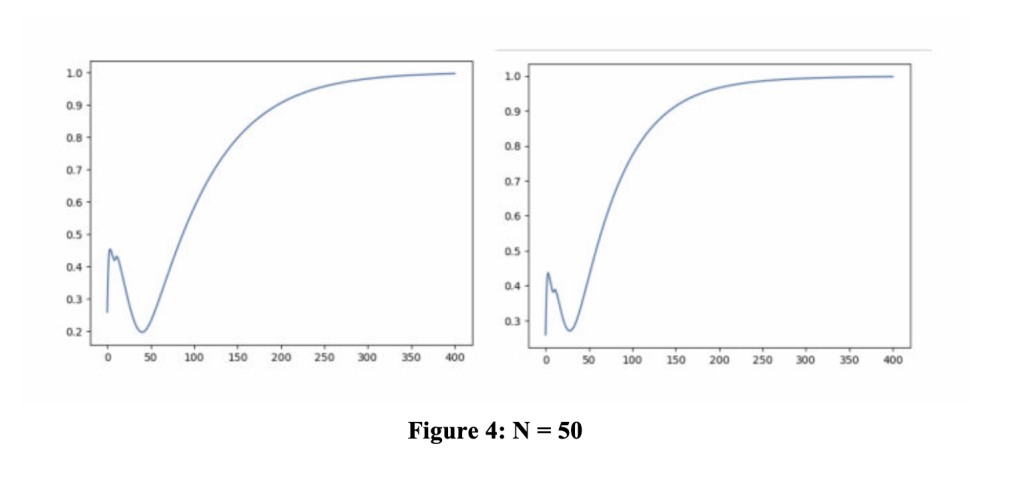
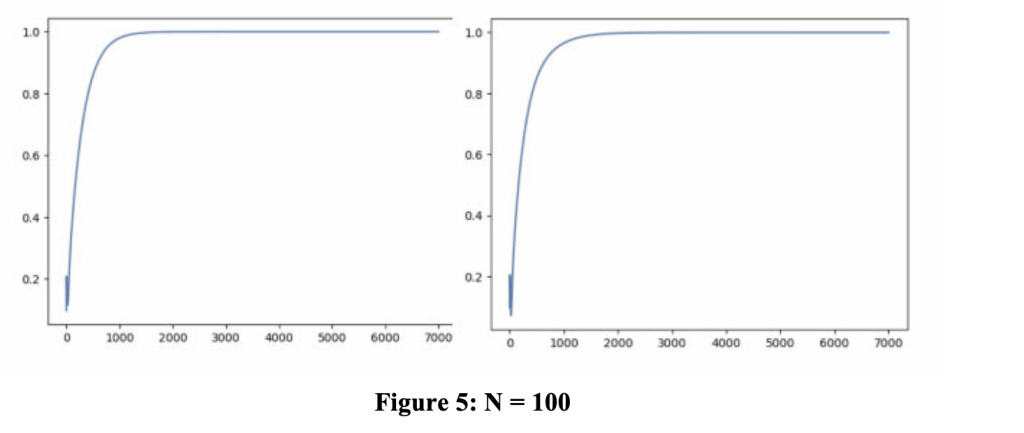
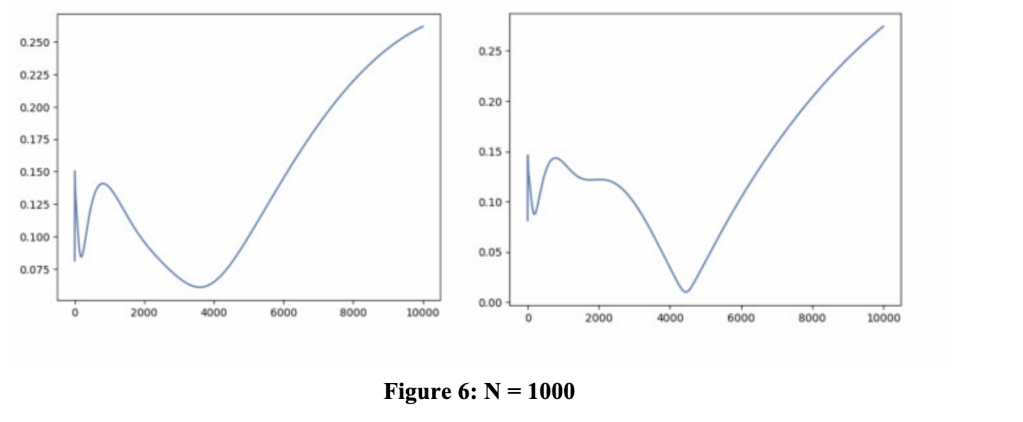
The simulations were then conducted for both topologies with heterogeneous frequencies given coupling strength K = 1 and oscillator amounts N = 10, N = 50, N = 100, and N = 1000. The simulated r(t) graphs for the dynamical systems with heterogeneous natural frequencies are produced as follows:
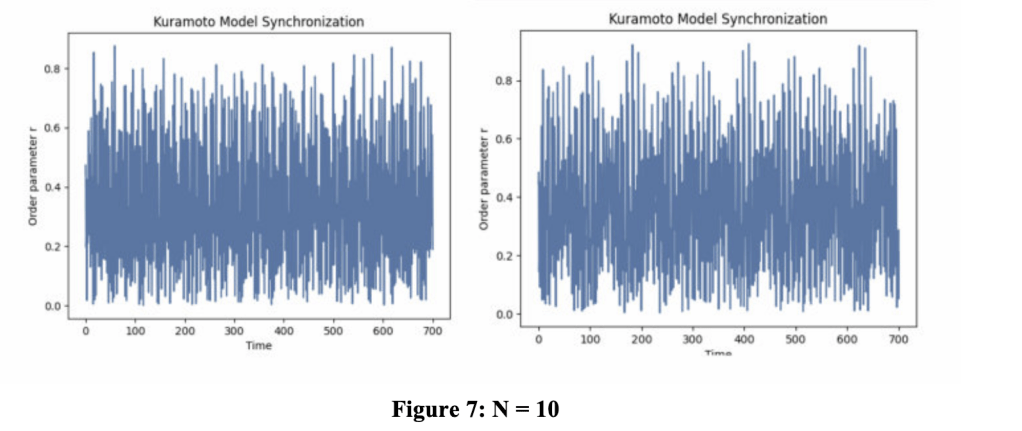
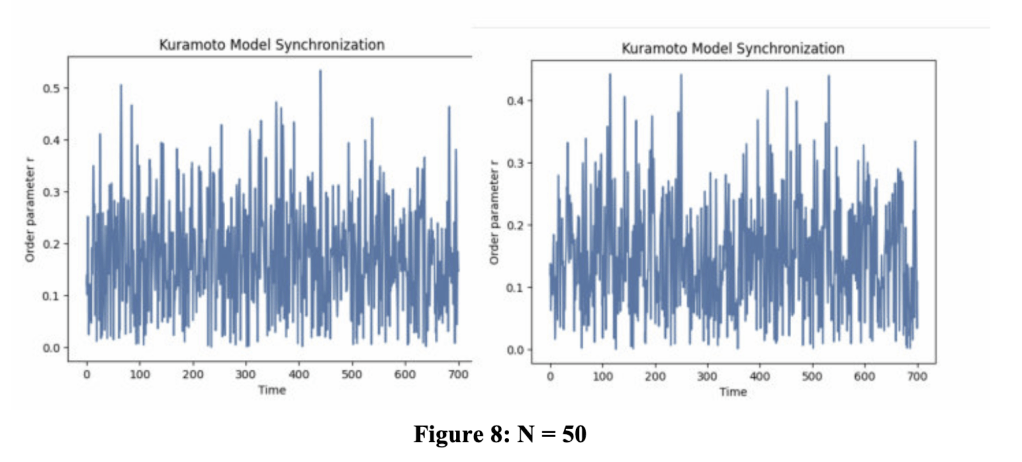
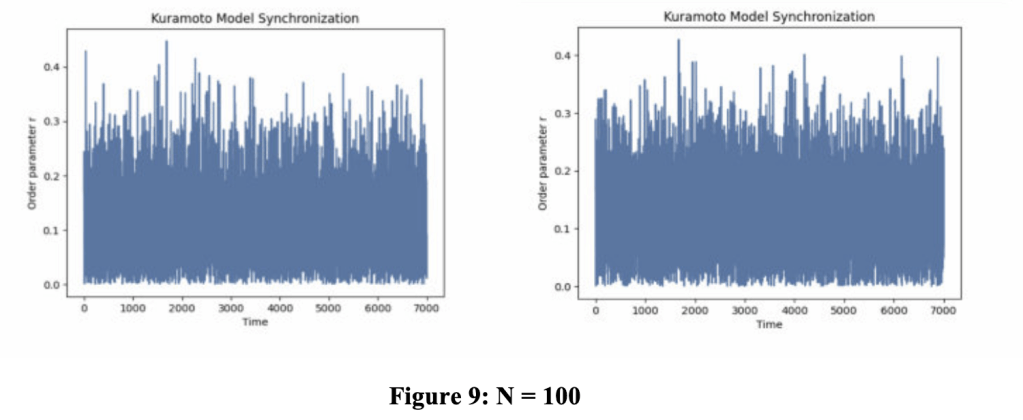
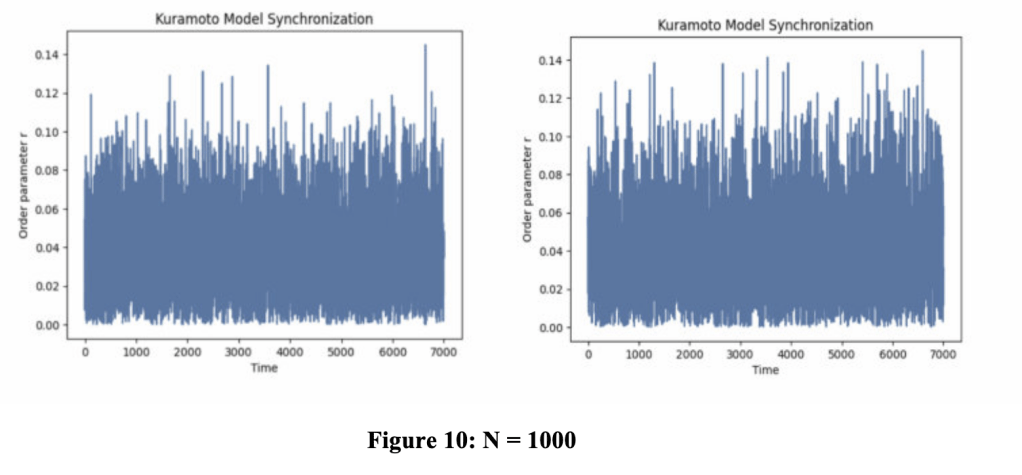
All graphs display partial synchronization. At N = 10, the ring and chain both demonstrate similar partial synchronization levels (r∞ ≈ 0.3) with the chain exhibiting more irregular oscillatory motion (represented by the fluctuations on the graphs shown). At N = 50, the synchronization level decreases as r∞ drops to roughly 0.15. The chain still continues to maintain a greater amount of irregular oscillatory motion. At N = 100, the r∞ continues to assume a value close to 0.15. Interestingly, the irregular oscillatory motion for both topologies appears identical for the most part, indicating that differences in irregular oscillatory motion could possibly disappear in the thermodynamic limit (N → ∞). At N = 1000, r∞ drops significantly to 0.04 for both the ring and the chain. This is consistent with the established result that the order parameter r asymptotically approaches 0 in the thermodynamic limit. The irregular oscillatory motion appears even more homogeneous for both topologies. Cumulatively, the graphical evidence from both cases (identical and heterogeneous natural frequencies) conclusively establishes that the long-term behavior of dynamical systems in the ring and chain topologies converge and become identical in the thermodynamic limit. This is attributable to the fact that boundary effects distinguishing the ring and chain vanish in the thermodynamic limit due to the the fraction of open boundary nodes in the chain becoming effectively zero.
A set of simulations was also conducted with K = 1 and heterogeneous natural frequencies selected from the same Gaussian distribution used previously for N = 2, N = 3, N = 4, N = 5, and N = 6. It later becomes evident that N = 4 is a special case. The r(t) graphs for both topologies are displayed as follows:
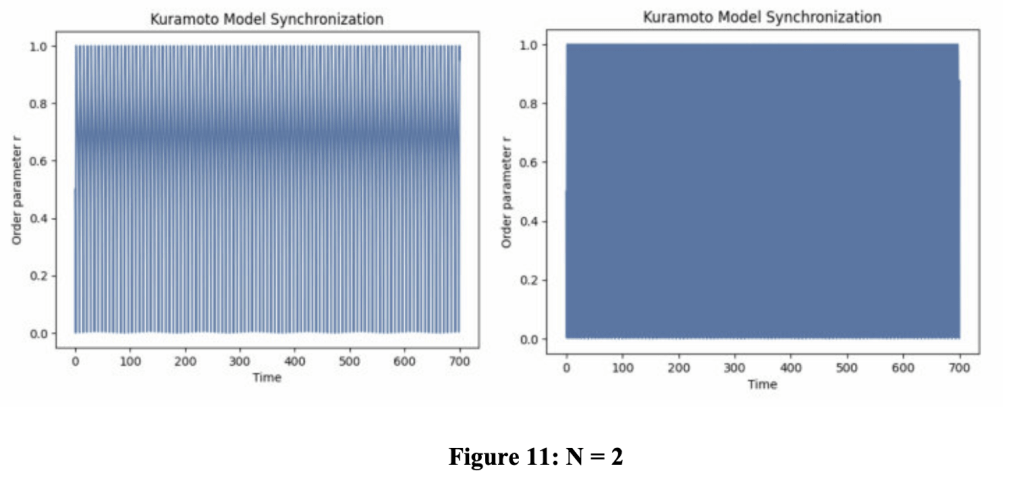
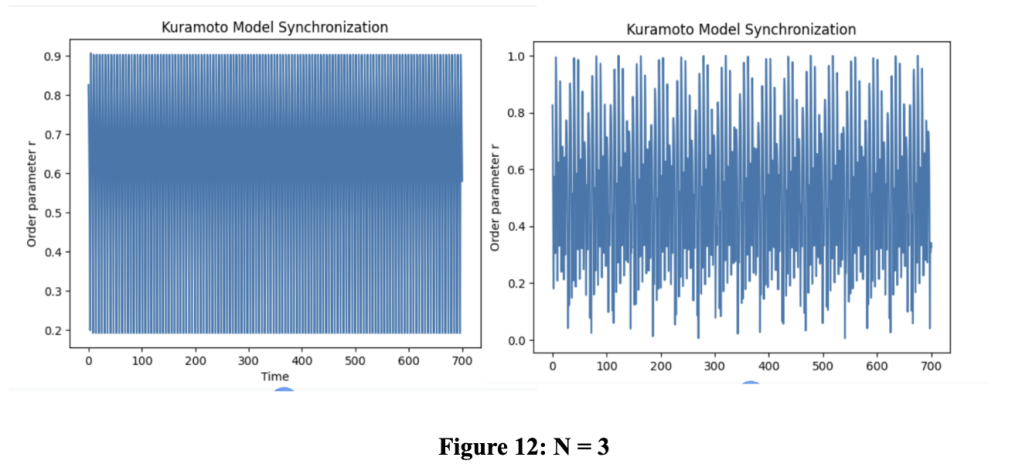
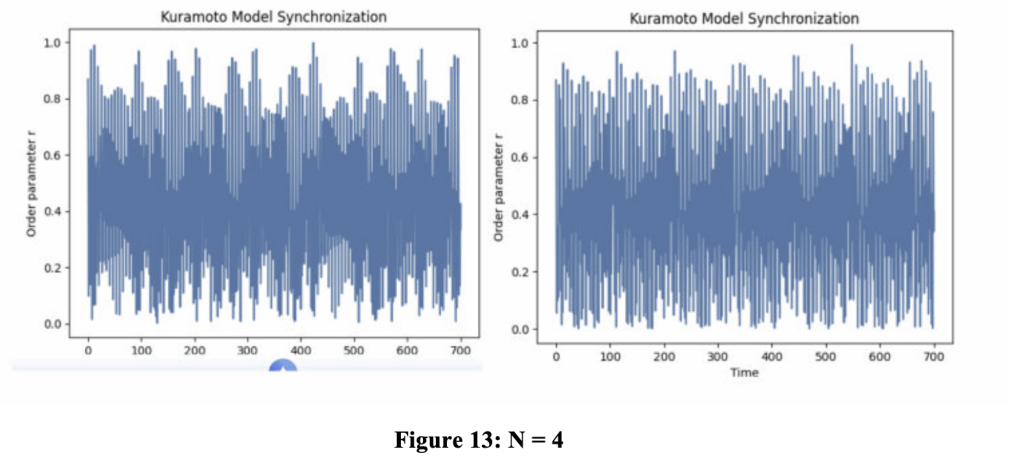
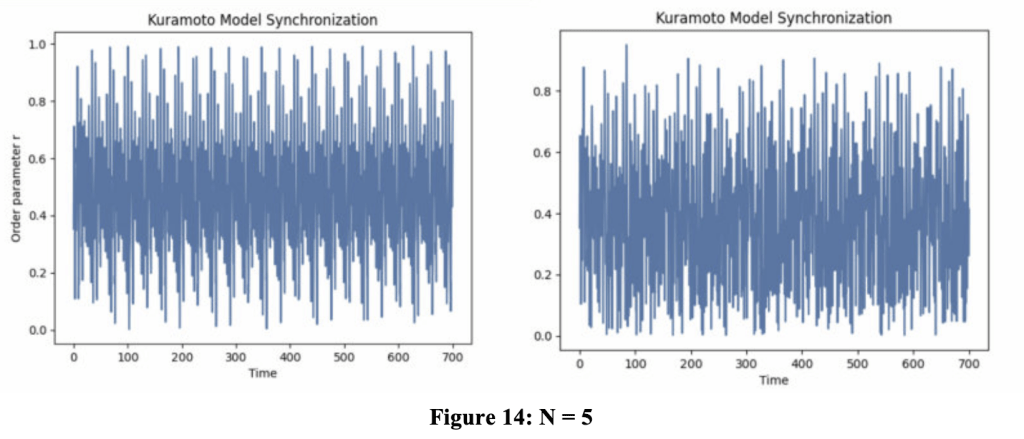
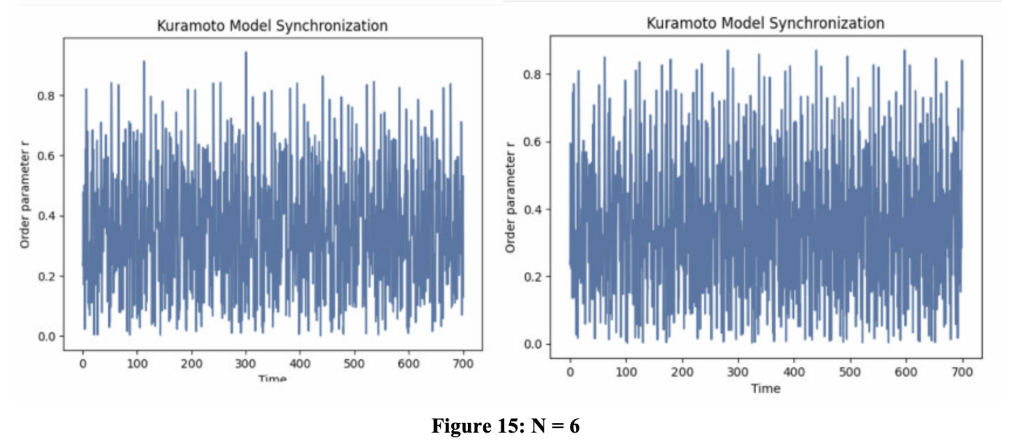
For N = 2, r∞ and the fluctuations (irregular oscillatory motion) of both topologies are identical. This result is expected as there is no structural difference between the ring and the chain for two oscillators. For N = 3, the graphs for the ring and chain are largely divergent with little to no visual similarity. The r∞ for both topologies is roughly the same at around 0.5, demonstrating nearly identical levels of synchronization. However, a substantial amount of irregular oscillatory motion is found for the chain topology as opposed to the ring. This can be attributed to the fact that the majority of oscillators in the chain (2/3) are boundary nodes which in turn leads to weaker effective coupling. For N = 4, both the ring and the chain demonstrate similarity in their oscillatory fluctuations. However, the ring exhibits a higher level of synchronization with an r∞ of approximately 0.5 as opposed to the chain’s approximate r∞ of 0.4. The case of N = 4 is special due to the fact that the ring possesses both rotational symmetry and an equal degree for each oscillator in addition to the fact that the chain possesses an equal number of interior and boundary nodes. In such a setup, the chain has boundary effects and interior dynamics counteracting one another equally. Given this stark difference between the topologies at N = 4, it was rather surprising to find that the oscillatory fluctuations remained largely similar. However, the synchronization levels began to diverge, with the ring exhibiting a greater final average order parameter. For N = 5 and N = 6, the same pattern could be found. The irregular oscillatory motion of both topologies remained largely similar when compared but the ring continued to maintain a higher level of synchronization than the chain. This divergence in synchronization levels for small oscillator amounts between the ring and chain can be attributed to the structural differences between the aforementioned topologies. Therefore, structural differences do indeed affect synchronization and their effect is particularly significant for small oscillator amounts. This as opposed to the large oscillator amounts, where structural differences are diminished and the topologies converge, approaching mean-field dynamics in the thermodynamic limit. Therefore, the ring cannot be used as an approximation in lieu of the chain for small oscillator amounts, and vice versa.
Part 2: Spontaneous Synchronization Transition of the Ring Topology
The spontaneous synchronization transition of a dynamical system refers to the transformation from an unordered state of oscillators to one whose process of synchronization has been set forth. A spontaneous synchronization transition occurs when the coupling strength of a given all-to-all system is equal to a critical value KC. The probability density g(ω) of the distribution of natural frequencies can be calculated as follows:
After resolving the all-to-all Kuramoto model into an equivalent rotating frame, substituting the appropriate values (ω = 0, μ = 0, and σ = 1) provides us with g(0) = 0.399 which can be substituted in the following equation:
From this, KC ≈ 1.6 is obtained. Therefore, the critical coupling strength at which synchronization is made possible for a standard all-to-all Kuramoto model with the aforementioned initial conditions is approximately 1.6.
As for the ring topology, multiple simulations were run for a dynamical system with N = 1000 to obtain the following r∞(K) graph:
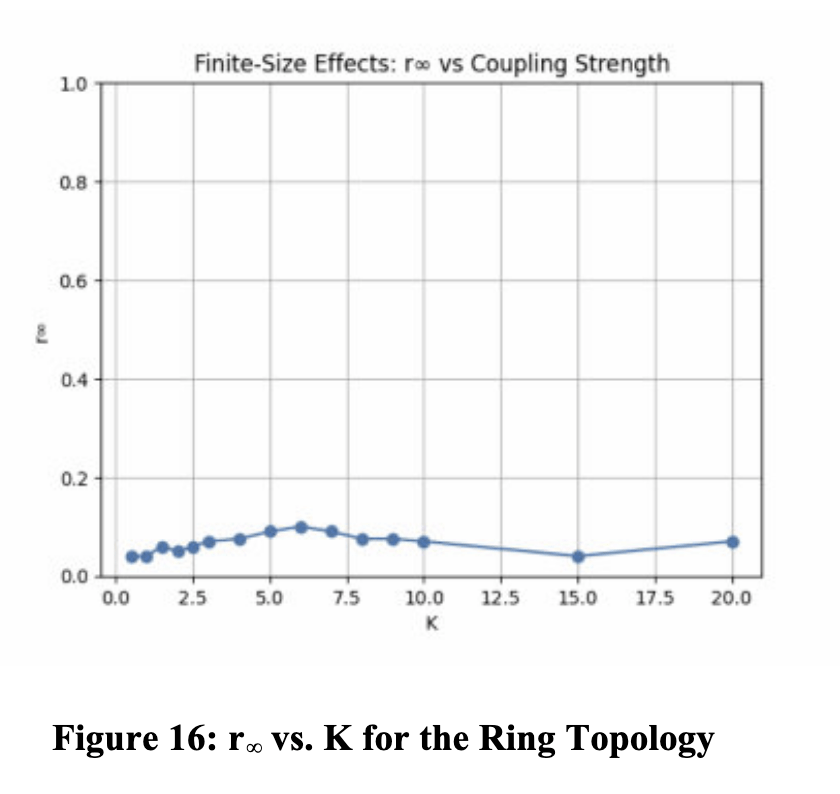
Surprisingly, the ring topology demonstrates no macroscopic synchronization transition for coupling strengths up to K = 20, as opposed to the standard all-to-all Kuramoto model which exhibits a well-defined synchronization transition.
Conclusion
The results obtained by the writer from the aforementioned simulative investigations underscore the substantial effect of network topology on synchronization dynamics in a population of coupled oscillators. The first part of the study proved that the effect of structural differences in the ring and chain topologies becomes negligible in the thermodynamic limit, ensuring convergent and near-identical behavior. However, the effect of structural differences in the aforementioned topologies became a determining factor in the level of synchronization eventually reached by systems with small oscillator amounts, positing a link between topological structure and long-term synchronization. The suggestion that there exists a link between topological structure and long-term synchronization is greatly reinforced by the latter portion of the study where it is proven that the functional dependence between the final average order parameter of a dynamical system and the coupling strength is largely constant in the ring topology, thus demonstrating no evidence of a spontaneous synchronization transition. This is to be contrasted with the standard all-to-all Kuramoto model where there exists a well-defined and apparent synchronization transition at a specific critical coupling strength. Therefore, the study decisively establishes that topological structure is a determining factor in long-term synchronization dynamics, i.e. the topology of a dynamical system directly affects the manner in which synchronization occurs. As a result, this study sheds light on the manner in which convergence and divergence appear in synchronization dynamics, which helps contextualize observed effects of topological structure in real-world electric, biological, and neuronal systems. A relevant direction of future study which the writer wishes to undertake is to investigate a second-order Kuramoto model. A second-order Kuramoto model incorporates the effects of inertia and dampening; an investigation into the synchronization dynamics of a second-order Kuramoto would significantly augment the present understanding of real-world systems which, more often than not, happen to be more complex than the standard one-dimensional model investigated in this study.
